Primal-dual Newton’s method for TV Denoising
We present the Primal-dual Newton’s method to solver the Total Variation denoising problem
\[\min_{m \in \mathcal{M}} J(m) = \min_{m} \int_\Omega (m -d)^2 d{\boldsymbol{x}} + \alpha \int_\Omega |\nabla m |_\beta d{\boldsymbol{x}},\]where \(d = d({\boldsymbol{x}})\) is the data (noisy image), \(\alpha > 0\) is the regularization parameter, and
\[|\nabla m|_\beta = \sqrt{\|\nabla m^2\| + \beta}\]with \(\beta > 0\) leads to a differentiable approximation of the TV functional.
The variational formulation of the first order optimality conditions reads
Find \(m \in \mathcal{M}\) such that:
\[\int_\Omega ( m - d)\tilde{m} d{\boldsymbol{x}} + \alpha \int_\Omega \frac{\nabla m \cdot \nabla\tilde{m}}{|\nabla m|_\beta} d{\boldsymbol{x}} = 0 \quad \forall \tilde{m} \in \mathcal{M}.\]By standard techniques, we can show that if \(m\) is smooth enough the above variational form is equivalent to solving the boundary value problem
\(\left\{ \begin{array}{ll} -\alpha \nabla \cdot \left( \frac{\nabla m}{| \nabla m |_\beta} \right) + m = d, & \text{in } \Omega\\ \alpha \left( \frac{\nabla m}{| \nabla m |_\beta} \right) \cdot {\boldsymbol n} = 0, & \text{on } \partial\Omega, \end{array} \right.\) where \({\boldsymbol n}\) is the unit outward normal vector to \(\partial\Omega\).
A key observation is that the nonlinearity in the term
\[\boldsymbol{w} = \frac{\nabla m}{| \nabla m |_\beta}\]is the cause of the slow convergence of the Newton’s method, althought the variable \(\boldsymbol{w}\) itself is usually smooth since it represents the unit normal vector to the level sets of \(m\).
The primal-dual Newton’s method then explicitly introduce the variable \(\boldsymbol{w}\) in the first optimality conditions leading to the system of equations
\[\left\{ \begin{array}{ll} -\alpha \nabla \cdot \boldsymbol{w} + m = d, & \text{in } \Omega\\ \boldsymbol{w}|\nabla m|_\beta - \nabla m = 0, & \text{in } \Omega,\\ \end{array} \right.\]equipped with the boundary conditions \(\nabla m \cdot \boldsymbol{n} = \boldsymbol{w} \cdot \boldsymbol{n} = 0\) on \(\partial \Omega\).
In the primal-dual method, the Newton direction \((\hat{m}_k, \boldsymbol{\hat{w}}_k)\) is obtained by linearizing the system of nonlinear equation around a point \((m_k, \boldsymbol{w}_k)\) and solving
\[\begin{bmatrix} - \alpha \nabla \cdot & I \\ | \nabla m_k |_\beta & -\left( I - \frac{\boldsymbol{w_k}\otimes \nabla m_k}{| \nabla m_k |_\beta}\right) \nabla \\ \end{bmatrix} \begin{bmatrix} \boldsymbol{\hat{w}}_k \\ \hat{m}_k \end{bmatrix} = - \begin{bmatrix} -\alpha \nabla \cdot \boldsymbol{w}_k + m_k - d \\ \boldsymbol{w_k}|\nabla m_k|_\beta - \nabla m_k \end{bmatrix}\]The solution is then updated as
\[m_{k+1} = m_{k} + \alpha_m \hat{m}_k, \quad \boldsymbol{w}_{k+1} = \boldsymbol{w}_k +\alpha_w \boldsymbol{\hat{w}}_k,\]where \(\alpha_m\) is chosen to ensure sufficient descent of \(J(m)\) and \(\alpha_w\) is chosen to ensure \(\boldsymbol{w}_{k+1} \cdot \boldsymbol{w}_{k+1} \leq 1\).
1. Python imports
We import the following libraries:
math, which contains several mathematical functionsmatplotlib, numpy, scipy, three libraries that together allow similar functionalities to matlabdolfin, which allows us to discretize and solve variational problems using the finite element methodhippylib, the extesible framework I created to solve inverse problems in Python
Finally, we import the logging library to silence most of the output produced by dolfin.
import math
import matplotlib.pyplot as plt
%matplotlib inline
import numpy as np
import scipy.io as sio
import dolfin as dl
import hippylib as hp
from hippylib import nb
import logging
logging.getLogger('FFC').setLevel(logging.WARNING)
logging.getLogger('UFL').setLevel(logging.WARNING)
dl.set_log_active(False)
2. Geometry, true image, and data.
-
Read the true image from file, store the pixel values in
data -
The width of the image is
Lx = 1and heightLyis set such that the aspect ratio of the image is preserved. -
Generate a triangulation (pixelation)
meshof the region of interest. - Define the finite element spaces:
Vmof piecewise linear function on the elements ofmeshrepresenting the space of discretized images;Vwof piecewise constant vector functions on the elements ofmeshrepresenting the space of the normalized gradients $\boldsymbol{w}$Vwnomof piecewise constant functions on the elements ofmeshrepresenting the space of the $l^2$ of the normalized gradients $\boldsymbol{w}$
-
Interpolate the true image in the discrete space
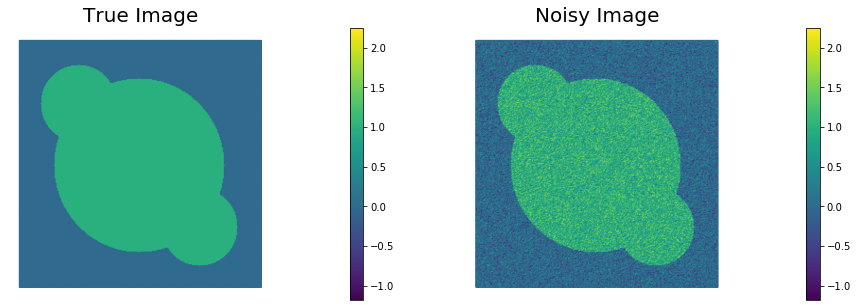
Vm. Call this interpolationm_true. -
Corrupt the true image with i.i.d. Gaussian noise ($\sigma^2 = 0.09$) and interpolated the noisy image in the discrete space
Vm. Call this interpolationd. - Visualize the true image
m_trueand the noisy imaged.
data = sio.loadmat('circles.mat')['im']
Lx = 1.
h = Lx/float(data.shape[0])
Ly = float(data.shape[1])*h
mesh = dl.RectangleMesh(dl.Point(0,0),dl.Point(Lx,Ly),data.shape[0], data.shape[1])
Vm = dl.FunctionSpace(mesh, "Lagrange",1)
Vw = dl.VectorFunctionSpace(mesh, "DG", 0)
Vwnorm = dl.FunctionSpace(mesh, "DG",0)
trueImage = hp.NumpyScalarExpression2D()
trueImage.setData(data, h, h)
m_true = dl.interpolate(trueImage, Vm)
np.random.seed(seed=1)
noise_std_dev = .3
noise = noise_std_dev*np.random.randn(data.shape[0], data.shape[1])
noisyImage = hp.NumpyScalarExpression2D()
noisyImage.setData(data+noise, h, h)
d = dl.interpolate(noisyImage, Vm)
# Get min/max of noisy image, so that we can show all plots in the same scale
vmin = np.min(d.vector().get_local())
vmax = np.max(d.vector().get_local())
plt.figure(figsize=(15,5))
nb.plot(m_true, subplot_loc=121, mytitle="True Image", vmin=vmin, vmax = vmax)
nb.plot(d, subplot_loc=122, mytitle="Noisy Image", vmin=vmin, vmax = vmax)
plt.show()
3. Total Variation denoising
The class PDTVDenosing defines the cost functional and its first & second variations for the primal dual formulation of the Total Variation denoising problem.
Specifically, the method cost implements the cost functional
where \(\alpha\) is the amount of regularization and \(\beta\) is a small pertubation to ensure differentiability of the total variation functional.
The method grad_m implements the first variation of \(\mathcal{J}\) w.r.t. \(m\)
The method Hessian implements the action of primal-dual second variation of \(\mathcal{J}\) w.r.t. \(m\) in the direction \(\hat{m}\):
where
\[A(m,w) = \frac{1}{2} \boldsymbol{w} \otimes \frac{\nabla m}{|\nabla m|_\beta} + \frac{1}{2} \frac{\nabla m}{|\nabla m|_\beta}\otimes \boldsymbol{w}.\]Finaly, the method compute_w_hat computes the primal dual Newton update for \(\boldsymbol{w}\),
class PDTVDenoising:
def __init__(self, Vm, Vw, Vwnorm, d, alpha, beta):
self.alpha = dl.Constant(alpha)
self.beta = dl.Constant(beta)
self.d = d
self.m_tilde = dl.TestFunction(Vm)
self.m_hat = dl.TrialFunction(Vm)
self.Vm = Vm
self.Vw = Vw
self.Vwnorm = Vwnorm
def cost_reg(self, m):
return dl.sqrt( dl.inner(dl.grad(m), dl.grad(m)) + self.beta)*dl.dx
def cost_misfit(self, m):
return dl.Constant(.5)*dl.inner(m-self.d, m - self.d)*dl.dx
def cost(self, m):
return self.cost_misfit(m) + self.alpha*self.cost_reg(m)
def grad_m(self, m):
grad_ls = dl.inner(self.m_tilde, m - self.d)*dl.dx
TVm = dl.sqrt( dl.inner(dl.grad(m), dl.grad(m)) + self.beta)
grad_tv = dl.Constant(1.)/TVm*dl.inner(dl.grad(m), dl.grad(self.m_tilde))*dl.dx
grad = grad_ls + self.alpha*grad_tv
return grad
def Hessian(self,m, w):
H_ls = dl.inner(self.m_tilde, self.m_hat)*dl.dx
TVm = dl.sqrt( dl.inner(dl.grad(m), dl.grad(m)) + self.beta)
A = dl.Constant(1.)/TVm * (dl.Identity(2)
- dl.Constant(.5)*dl.outer(w, dl.grad(m)/TVm )
- dl.Constant(.5)*dl.outer(dl.grad(m)/TVm, w ) )
H_tv = dl.inner(A*dl.grad(self.m_tilde), dl.grad(self.m_hat))*dl.dx
H = H_ls + self.alpha*H_tv
return H
def compute_w_hat(self, m, w, m_hat):
TVm = dl.sqrt( dl.inner(dl.grad(m), dl.grad(m)) + self.beta)
A = dl.Constant(1.)/TVm * (dl.Identity(2)
- dl.Constant(.5)*dl.outer(w, dl.grad(m)/TVm )
- dl.Constant(.5)*dl.outer(dl.grad(m)/TVm, w ) )
expression = A*dl.grad(m_hat) - w + dl.grad(m)/TVm
return dl.project(expression, self.Vw)
def wnorm(self, w):
return dl.inner(w,w)
4. Primal dual solution of Total Variation regularized denoising problem
The PDNewton function computes the primal dual solution of the total variation regularized denoising problem using the inexact Newton conjugate gradient algorithm with:
-
Eisenstat-Walker conditions to reduce the number of conjugate gradient iterations necessary to compute the Newton’direction \(\hat{m}\).
-
Backtracking linesearch on \(m_{k+1}\) based on Armijo’s sufficient descent condition
-
Backtracking linesearch on \(\boldsymbol{w}_{k+1}\) to ensure \(\boldsymbol{w}_{k+1} \cdot \boldsymbol{w}_{k+1} \leq 1\).
def PDNewton(pdProblem, m, w, parameters):
termination_reasons = [
"Maximum number of Iteration reached", #0
"Norm of the gradient less than tolerance", #1
"Maximum number of backtracking reached", #2
"Norm of (g, m_hat) less than tolerance" #3
]
rtol = parameters["rel_tolerance"]
atol = parameters["abs_tolerance"]
gdm_tol = parameters["gdm_tolerance"]
max_iter = parameters["max_iter"]
c_armijo = parameters["c_armijo"]
max_backtrack = parameters["max_backtracking_iter"]
prt_level = parameters["print_level"]
cg_coarse_tol = parameters["cg_coarse_tolerance"]
Jn = dl.assemble( pdProblem.cost(m) )
gn = dl.assemble( pdProblem.grad_m(m) )
g0_norm = gn.norm("l2")
gn_norm = g0_norm
tol = max(g0_norm*rtol, atol)
m_hat = dl.Function(pdProblem.Vm)
w_hat = dl.Function(pdProblem.Vw)
converged = False
reason = 0
total_cg_iter = 0
if prt_level > 0:
print( "{0:>3} {1:>15} {2:>15} {3:>15} {4:>15} {5:>15} {6:>7}".format(
"It", "cost", "||g||", "(g,m_hat)", "alpha_m", "tol_cg", "cg_it") )
for it in range(max_iter):
# Compute m_hat
Hn = dl.assemble( pdProblem.Hessian(m,w) )
solver = dl.PETScKrylovSolver("cg", "petsc_amg")
solver.set_operator(Hn)
solver.parameters["nonzero_initial_guess"] = False
cg_tol = min(cg_coarse_tol, math.sqrt( gn_norm/g0_norm) )
solver.parameters["relative_tolerance"] = cg_tol
lin_it = solver.solve(m_hat.vector(),-gn)
total_cg_iter += lin_it
# Compute w_hat
w_hat = pdProblem.compute_w_hat(m, w, m_hat)
### Line search for m
mhat_gn = m_hat.vector().inner(gn)
if(-mhat_gn < gdm_tol):
self.converged=True
self.reason = 3
break
alpha_m = 1.
bk_converged = False
for j in range(max_backtrack):
Jnext = dl.assemble( pdProblem.cost(m + dl.Constant(alpha_m)*m_hat) )
if Jnext < Jn + alpha_m*c_armijo*mhat_gn:
Jn = Jnext
bk_converged = True
break
alpha_m = alpha_m/2.
if not bk_converged:
self.reason = 2
break
### Line search for w
alpha_w = 1
bk_converged = False
for j in range(max_backtrack):
norm_w = dl.project(pdProblem.wnorm(w + dl.Constant(alpha_w)*w_hat), pdProblem.Vwnorm)
if norm_w.vector().norm("linf") <= 1:
bk_converged = True
break
alpha_w = alpha_w/2.
### Update
m.vector().axpy(alpha_m, m_hat.vector())
w.vector().axpy(alpha_w, w_hat.vector())
gn = dl.assemble( pdProblem.grad_m(m) )
gn_norm = gn.norm("l2")
if prt_level > 0:
print( "{0:3d} {1:15e} {2:15e} {3:15e} {4:15e} {5:15e} {6:7d}".format(
it, Jn, gn_norm, mhat_gn, alpha_m, cg_tol, lin_it) )
if gn_norm < tol:
converged = True
reason = 1
break
final_grad_norm = gn_norm
if prt_level > -1:
print( termination_reasons[reason] )
if converged:
print( "Inexact Newton CG converged in ", it, \
"nonlinear iterations and ", total_cg_iter, "linear iterations." )
else:
print( "Inexact Newton CG did NOT converge after ", self.it, \
"nonlinear iterations and ", total_cg_iter, "linear iterations.")
print ("Final norm of the gradient", final_grad_norm)
print ("Value of the cost functional", Jn)
return m, w
5. Results
The primal dual Newton’s methods converges in only 23 iterations compared to the hundreds of iterations we observed in the previous notebook by solving the primal formulation with Newton’s method.
alpha = 1e-3
beta = 1e-4
pdProblem = PDTVDenoising(Vm, Vw, Vwnorm, d, alpha, beta)
parameters = {}
parameters["rel_tolerance"] = 1e-6
parameters["abs_tolerance"] = 1e-9
parameters["gdm_tolerance"] = 1e-18
parameters["max_iter"] = 100
parameters["c_armijo"] = 1e-5
parameters["max_backtracking_iter"] = 10
parameters["print_level"] = 1
parameters["cg_coarse_tolerance"] = 0.5
m0 = dl.Function(Vm)
w0 = dl.Function(Vw)
m, w = PDNewton(pdProblem, m0, w0, parameters)
plt.figure()
nb.plot(m, vmin=vmin, vmax = vmax, mytitle="alpha = {0:1.2e}".format(alpha))
plt.show()
It cost ||g|| (g,m_hat) alpha_m tol_cg cg_it
0 1.291009e-01 1.886530e-03 -2.502929e-01 1.000000e+00 5.000000e-01 1
1 3.873716e-02 8.860229e-04 -1.582825e-01 1.000000e+00 5.000000e-01 1
2 2.658464e-02 7.936144e-04 -2.249286e-02 1.000000e+00 5.000000e-01 1
3 2.550606e-02 5.664402e-04 -1.809066e-03 1.000000e+00 5.000000e-01 1
4 2.524188e-02 4.059965e-04 -3.389324e-04 1.000000e+00 4.535858e-01 1
5 2.517445e-02 3.062689e-04 -7.888608e-05 1.000000e+00 3.840109e-01 1
6 2.514686e-02 2.363270e-04 -3.121976e-05 1.000000e+00 3.335292e-01 1
7 2.513036e-02 2.331888e-04 -1.890917e-05 1.000000e+00 2.929808e-01 2
8 2.511869e-02 1.726600e-04 -1.352313e-05 1.000000e+00 2.910290e-01 3
9 2.511195e-02 1.347310e-04 -7.896096e-06 1.000000e+00 2.504253e-01 3
10 2.510797e-02 9.343123e-05 -5.008598e-06 1.000000e+00 2.212158e-01 4
11 2.510613e-02 6.925899e-05 -2.291866e-06 1.000000e+00 1.842165e-01 5
12 2.510524e-02 4.428930e-05 -1.107601e-06 1.000000e+00 1.586063e-01 6
13 2.510477e-02 2.495412e-05 -5.848210e-07 1.000000e+00 1.268329e-01 8
14 2.510461e-02 1.576014e-05 -2.016876e-07 1.000000e+00 9.520364e-02 4
15 2.510449e-02 9.287469e-06 -1.501678e-07 1.000000e+00 7.565931e-02 12
16 2.510446e-02 5.203375e-06 -5.062124e-08 1.000000e+00 5.808060e-02 9
17 2.510444e-02 2.790608e-06 -1.940889e-08 1.000000e+00 4.347354e-02 12
18 2.510444e-02 1.536326e-06 -7.085339e-09 1.000000e+00 3.183698e-02 8
19 2.510443e-02 7.638786e-07 -2.764889e-09 1.000000e+00 2.362241e-02 13
20 2.510443e-02 3.451925e-07 -6.318551e-10 1.000000e+00 1.665692e-02 16
21 2.510443e-02 1.361502e-07 -1.980715e-10 1.000000e+00 1.119729e-02 19
22 2.510443e-02 4.353155e-08 -3.919911e-11 1.000000e+00 7.032207e-03 23
23 2.510443e-02 9.434777e-09 -4.154197e-12 1.000000e+00 3.976349e-03 26
24 2.510443e-02 1.237776e-09 -1.957751e-13 1.000000e+00 1.851178e-03 29
Norm of the gradient less than tolerance
Inexact Newton CG converged in 24 nonlinear iterations and 209 linear iterations.
Final norm of the gradient 1.2377756974758529e-09
Value of the cost functional 0.025104432509651366

Copyright © 2019-2020, Washington University in St. Louis.
All Rights reserved. See file COPYRIGHT for details.
This file is part of cmis_labs, the teaching material for ESE 5932 Computational Methods for Imaging Science at Washington University in St. Louis. Please see https://uvilla.github.io/cmis_labs for more information and source code availability.
We would like to acknowledge the Extreme Science and Engineering Discovery Environment (XSEDE), which is supported by National Science Foundation grant number ACI-1548562, for providing cloud computing resources (Jetstream) for this course through allocation TG-SEE190001.